OptiPump Controllers are not designed with a one-size-fits-all approach. AID has the expertise to deliver tailored controllers for each unique field application. Regardless of your industry our cutting-edge control, diagnostic and monitoring capabilities can help you manage your assets and improve performance.
APPLICATIONS & INDUSTRIES
A passion for excellence.
AID’s focus on advanced engineering and design ensures our controllers will perform at the highest level. With a robust set of reports and configuration options, OptiPump controllers provide a new level of visibility and control at your job site.
ESP Drives – Our ESP controllers are perfect for gassy wells, with traditional gas lock recovery mode built in. And with AID’s unique gas lock avoidance control, you can prevent gas lock all together.
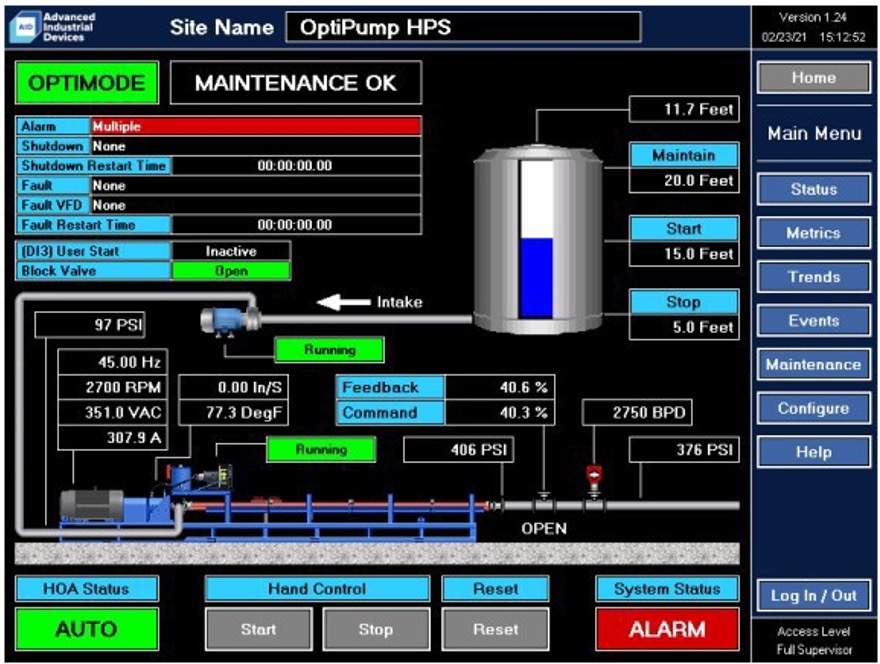
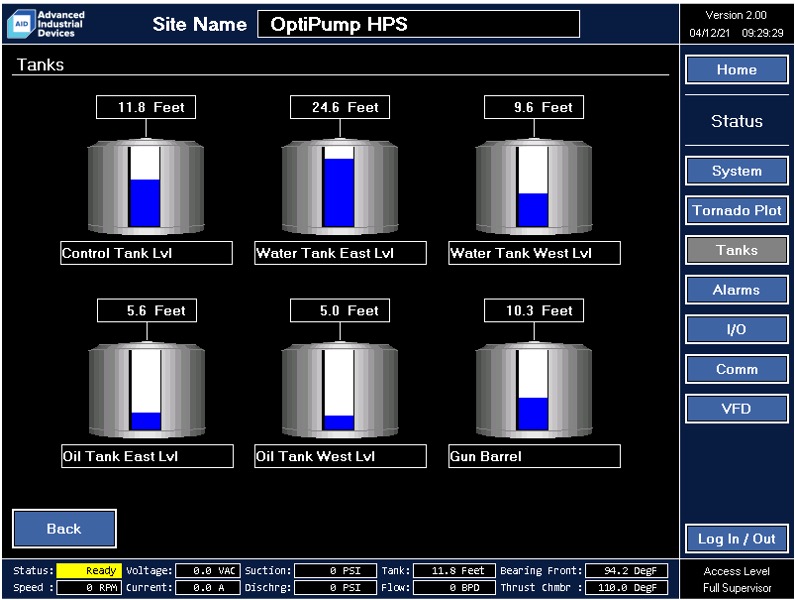
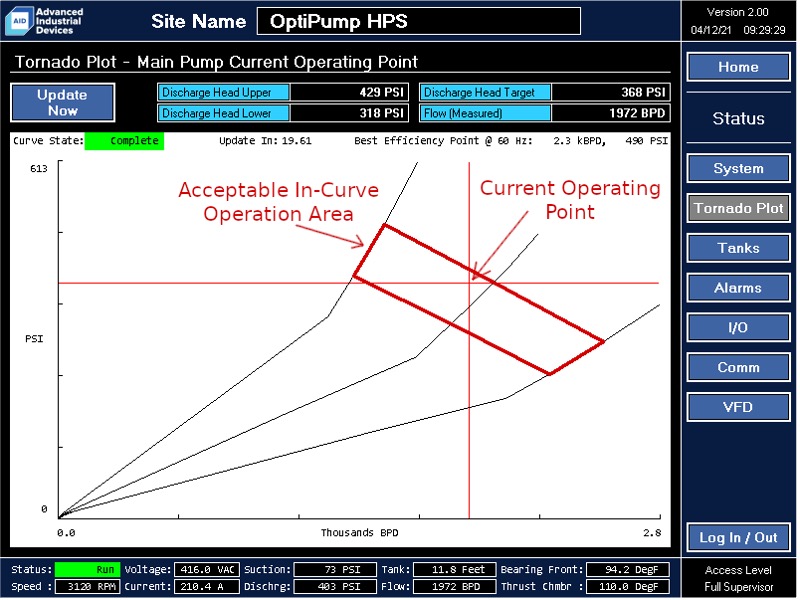
HPS Drives – HPS controllers include a full assortment of shutdown inputs, back-pressure valve control, plus a full series of additional controls tailored for your HPS site.
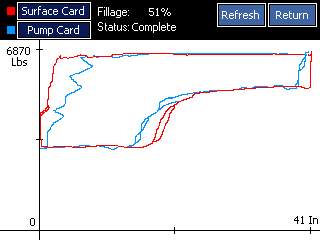
Rod Lift Drives – The OptiPump Rod Lift controller now creates a full dynacard. Utilizing both surface and downhole cards, the OptiPump Rod Lift controller provides advanced insight in critical well operation and performance.
Jet Pump Drives – Jet Pump controllers can monitor and control pump speed, discharge pressure, flowrate and other key performance metrics.
Progressive Cavity Drives – Our Progressive Cavity controllers offer a full assortment of shutdown inputs, as well as back-pressure valve control and a full assortment of other control options.
MobileDuty Drives – The user-friendly interface found on our MobileDuty controllers supports a streamlined setup process, plus quick and easy adjustments as the environments change.